В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.
Понятие сервопривода
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Иными словами:
- Сервопривод получает на вход значение управляющего параметра. Например, угол поворота.
- Блок управления сравнивает это значение со значением на своём датчике.
- На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Наиболее распространены сервоприводы, которые удерживают заданный угол, и сервоприводы, поддерживающие заданную скорость вращения.
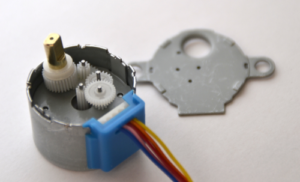
Типичный хобби-сервопривод изображён ниже.

Каким же образом устроены сервоприводы?
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
 Arduino — библиотеки. Установка, подключение, удаление
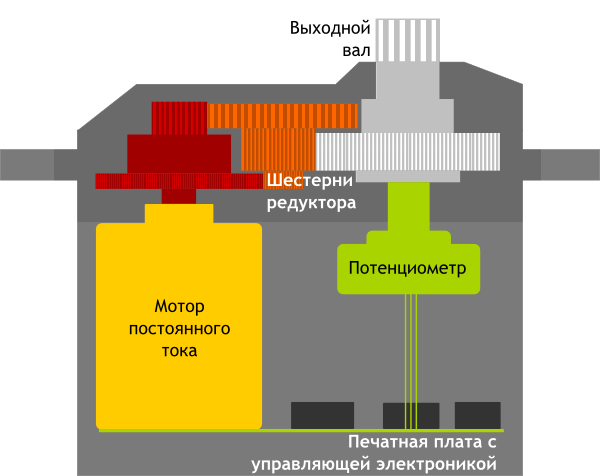
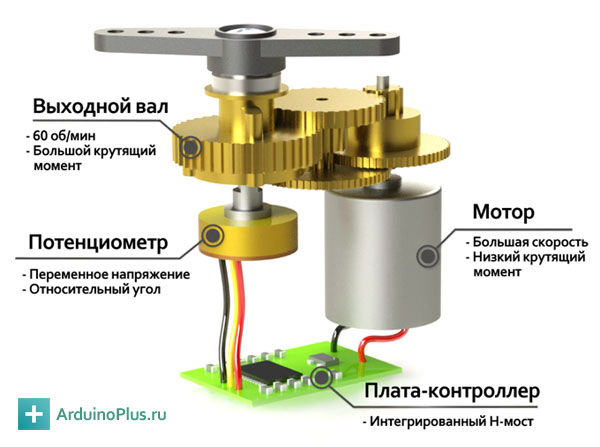
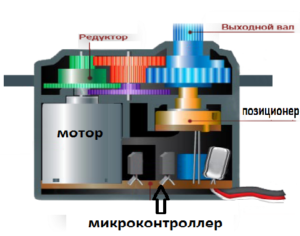
Arduino — библиотеки. Установка, подключение, удалениеПривод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Управление сервоприводом. Интерфейс управляющих сигналов
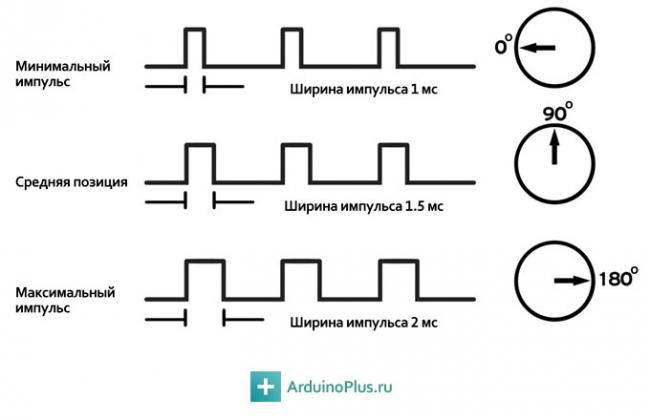
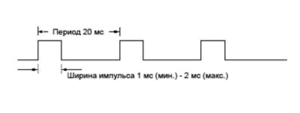
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
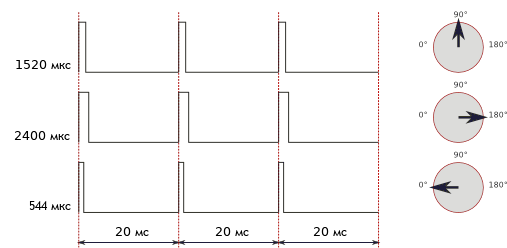
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
 Как подключить модуль камеры OV7670 к Arduino
Как подключить модуль камеры OV7670 к ArduinoОбратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
Характеристики сервоприводов
Теперь давайте разберёмся, какие бывают сервоприводы и какими характеристиками они обладают.
Крутящий момент и скорость поворота
Сначала поговорим о двух очень важных характеристиках сервопривода: о крутящем моменте и о скорости поворота.
Момент силы, или крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
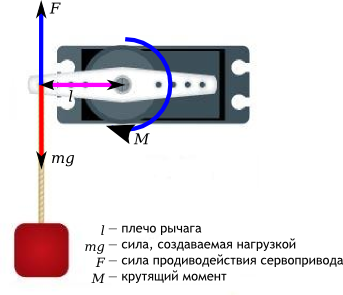
Проще говоря, эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Стоит отметить, что иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Конечно, мы всегда можем взять установку, потребляющую большую мощность, главное, чтобы её характеристики удовлетворяли нашим потребностям.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
- маленькие
- стандартные
- большие
Обладают они при этом следующими характерными габаритами:
| Вес | Линейные размеры | |
|---|---|---|
| маленькие | 8-25 г | 22×15×25 мм |
| стандартные | 40-80 г | 40×20×37 мм |
| большие | 50-90 г | 49×25×40 мм |
Бывают ещё так называемые сервоприводы «специального вида» с габаритами, не попадающими в данную классификацию, однако процент таких сервоприводов весьма мал.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
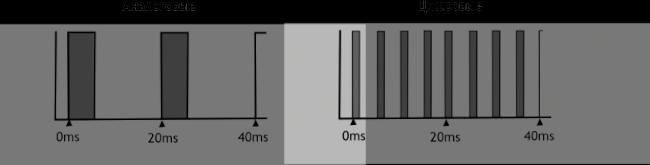
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
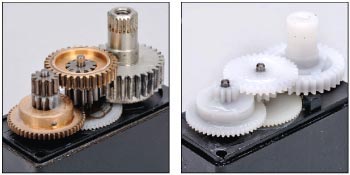
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.

Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
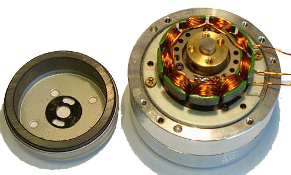
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту
5Vили напрямую к источнику питания - коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода: 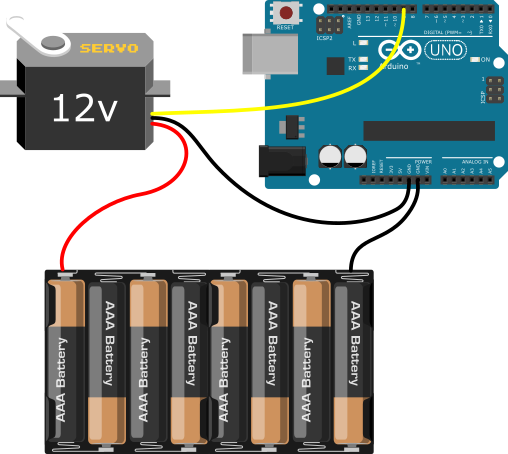
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Функционал библиотеки Servo
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого заводится переменная типа Servo. Управление осуществляется следующими функциями:
-
attach()— присоединяет переменную к конкретному пину. Возможны два варианта синтаксиса для этой функции:servo.attach(pin)иservo.attach(pin, min, max). При этомpin— номер пина, к которому присоединяют сервопривод,minиmax— длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно. -
write()— отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис следующий:servo.write(angle), гдеangle— угол, на который должен повернуться сервопривод. -
writeMicroseconds()— отдаёт команду послать на сервоприводимульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий:servo.writeMicroseconds(uS), гдеuS— длина импульса в микросекундах. -
read()— читает текущее значение угла, в котором находится сервопривод. Синтаксис следующий:servo.read(), возвращается целое значение от 0 до 180. -
attached()— проверка, была ли присоединена переменная к конкретному пину. Синтаксис следующий:servo.attached(), возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае. -
detach()— производит действие, обратное действиюattach(), то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис следующий:servo.detach().
Пример использования библиотеки Servo
- servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами#include // создаём объект для управления сервоприводом Servo myservo; void setup(){// подключаем сервопривод к 9 пину myservo.attach(9);} void loop(){// устанавливаем сервопривод в серединное положение myservo.write(90); delay(500);// устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500);// устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
По аналогии подключим 2 сервопривода
- 2servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами#include // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup(){// подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12);} void loop(){// устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500);// устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500);// устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500);}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
-
// подключаем библиотеку для работы с сервоприводами// данная библиотека совместима с библиотекой «VirtualWire»// для работы с приёмником и передатчиком на 433 МГц#include <servo2>/ создаём объект для управления сервоприводом Servo2 myservo; void setup(){// подключаем сервопривод к 9 пину myservo.attach(9);} void loop(){// устанавливаем сервопривод в серединное положение myservo.write(90); delay(500);// устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500);// устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Вместо заключения
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Сервопривод Ардуино (англ. — arduino servo) — устройство с электрическим мотором, которое можно повернуть на определенный угол и оставить в этом положении на определенное время.
Сервомоторы Ардуино по сути своей отличные устройства, которые могут поворачиваться в указанное положение и могут применяться в огромном количестве областей. Особенно сейчас их чаще всего применяют в робототехнике.
Обычно у них есть выходной вал, который может поворачиваться на 180 градусов. Используя Arduino мы можем задать сервомотору определенное положение в которое он перейдет.
Изначально сервоприводы начали использовать еще задолго до появления Ардуино, скажем так, в мире пультов дистанционного управления (RC), как правило, для управления рулевым колесом игрушечных машинок или крыльями самолетов. Со временем они нашли свое применение в робототехнике, автоматизации и, конечно же, в мире Ардуино.
В нашем материале мы увидим как подключить сервопривод Ардуино, а затем как управлять этим полезным механизмом и поворачивать его в определенные положения.
Как это работает
Сервоприводы Arduino — это умные устройства. Используя только один входной пин, они получают значения для позиционирования от микроконтроллера и переходят в это положение. Как можно увидеть на рисунке в самом начале статьи внутри они имеют двигатель и цепь обратной связи, которая гарантирует, что вал/рычаг сервопривода достигнет желаемого положения.
Но какой сигнал сервомоторы получают на входе? Это прямоугольная волна, подобная PWM (англ. — pulse-width modulation, широтно-импульсная модуляция). Каждый цикл в сигнале длится 20 миллисекунд, и большая часть времени в значении LOW. В начале каждого цикла значение сигнала становится HIGH на время от 1 до 2 миллисекунд. При 1 миллисекунде она составляет 0 градусов, а при 2 миллисекундах — 180 градусов, а в промежутке значение от 0 до 180. Это очень хороший и надежный метод. График выше упрощает понимание.
Комплектующие
Нам понадобятся следующие детали:
- Плата Arduino (подключенная к компьютеру через USB), подойдет Arduino Uno;
- Сервопривод;
- Перемычки.
В мире сервомоторов мало известных брендов. Как пример, можно взять Hitec и Futaba, которые являются ведущими производителями сервоприводов для RC-моделей. Но в целом найти подходящий на АлиЭкспресс и подобных сайтах не сложно.
Подключение сервопривода к Ардуино
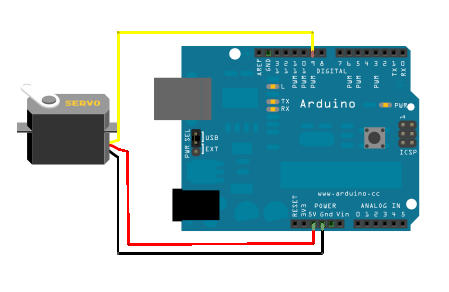
Схема подключения ниже:
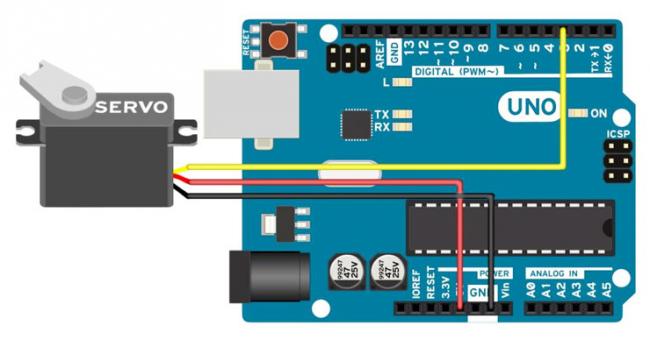
Сервомотор имеет много встроенных деталей: двигатель, цепь обратной связи и, самое главное, драйвер мотора. Ему просто нужно дополнительно питание, земля и один контрольный пин. Ниже шаги для подключения сервопривода к Arduino, но вы можете всегда свериться с изображением выше.
- Сервомотор имеет гнездовой разъем с тремя контактами. Самый темный или даже черный — это обычно земля. Подключите его к GND Arduino.
- Подключите кабель питания, который по всем стандартам должен быть красным к 5В на Ардуино.
- Подключите оставшийся контакт разъема сервопривода к цифровому выходу на Arduino.
Также ниже приводим пример подключения двигателя и Arduino Diecimilia. Фото найдено на официальном сайте производителя микроконтроллеров.
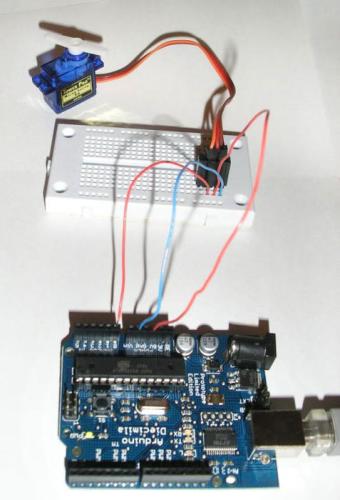
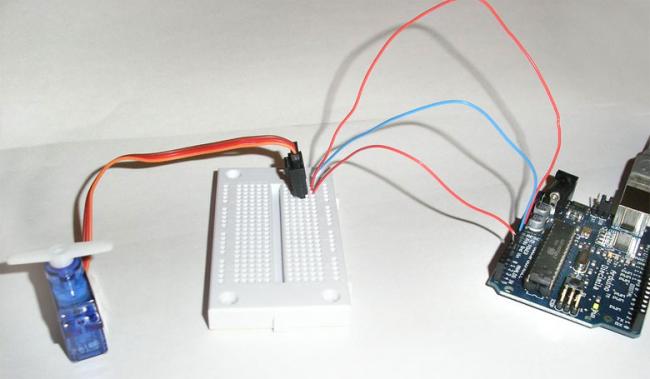
Для этого варианта подключение следующее:
- Подключите красный от сервопривода к +5 В на ардуине.
- Подключите черный/коричневый от сервопривода к Gnd на ардуино.
- Подключите белый/оранжевый от сервопривода к аналоговому 0 на arduino.
Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Также дополнительно мы используем библиотеку servo — скачайте ниже или в нашем разделе Библиотеки.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скачать библиотеку servo .zipСкачать .ino
// Подклоючаем библиотеку Servo #include // Пин для сервопривода int servoPin = 3; // Создаем объект Servo Servo1; void setup() { // Нам нужно подключить сервопривод к используемому номеру пина Servo1.attach(servoPin); } void loop(){ // 0 градусов Servo1.write(0); delay(1000); // 90 градусов Servo1.write(90); delay(1000); // 180 градусов Servo1.write(180); delay(1000); }
Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Помните, что использование библиотеки Servo автоматически отключает функцию PWM для PWM-контактов 9 и 10 на Arduino UNO и аналогичных платах.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Скачать servo .zip
Сам код такой:
#include Servo servo1; Servo servo2; void setup() { pinMode(1,OUTPUT); servo1.attach(14); //analog pin 0 //servo1.setMaximumPulse(2000); //servo1.setMinimumPulse(700); servo2.attach(15); //analog pin 1 Serial.begin(19200); Serial.println("Ready"); } void loop() { static int v = 0; if ( Serial.available()) { char ch = Serial.read(); switch(ch) { case '0'...'9': v = v * 10 + ch - '0'; break; case 's': servo1.write(v); v = 0; break; case 'w': servo2.write(v); v = 0; break; case 'd': servo2.detach(); break; case 'a': servo2.attach(15); break; } } Servo::refresh(); }
Стандартные методы серво-библиотеки
attach(int)
Соединение пина и сервопривода. Вызывает pinMode. Возвращает 0 при ошибке.
detach()
Отсоединение пина от сервопривода.
write(int)
Установка угла сервопривода в градусах, от 0 до 180.
read()
Возвращает значение, установленное write(int).
attached()
Возвращает 1, если серво в настоящее время подключен.
Дополнительные примеры скетчей
Следующий код позволяет вам контролировать серводвигатель на пине 2 с помощью потенциометра на аналоговом 0.
#include <softwareservoervo myservo="" create="" servo="" object="" to="" control="" a="" int="" potpin="0;" analog="" pin="" used="" connect="" the="" potentiometer="" val="" variable="" read="" value="" from="" void="" setup="" myservo.attach="" attaches="" on="" loop="" reads="" of="" between="" and="" scale="" it="" use="" with="" myservo.write="" sets="" position="" according="" scaled="" delay="" waits="" for="" get="" there="">
Следующий код — это поворот (пинг/понг) на выводе A0 с переменной скоростью.
#include <softwareservoervo myservo="" create="" servo="" object="" to="" control="" a="" pinservo="" a0="" int="" speed="1;" limits="" set="" limitations="">180) boolean refresh = false;// toggle refresh on/off void setup() { Serial.begin(9600); // attaches the servo on pin to the servo object myservo.attach(pinServo); // init angle of servo inbetween two limitations myservo.write((limits[1]-limits[0])/2); } void loop() { // refresh angle int angle = myservo.read(); // change direction when limits if (angle >= limits[1] || angle <= limits[0]) speed = -speed; myservo.write(angle + speed); // set refresh one time / 2 refresh = refresh ? false : true; if (refresh) SoftwareServo::refresh(); Serial.print("Angle: "); Serial.println(angle); }</softwareservoervo>
Дополнительные возможности
Управление сервоприводами на Ардуино очень простое и мы можем использовать еще несколько интересных фишек.
Контроль точного времени импульса
Ардуино имеет встроенную функцию servo.write(градусы), которая упрощает управление сервомоторами. Однако не все сервоприводы соблюдают одинаковые тайминги для всех позиций. Обычно 1 миллисекунда означает 0 градусов, 1,5 миллисекунды — 90 градусов, и, конечно, 2 миллисекунды означают 180 градусов. Некоторые сервоприводы имеют меньший или больший диапазон.
Для лучшего контроля мы можем использовать функцию servo.writeMicroseconds(микросекунды), которая в качестве параметра принимает точное количество микросекунд. Помните, 1 миллисекунда равна 1000 мкс.
Несколько сервоприводов
Чтобы использовать более одного сервопривода в Ардуино нам нужно объявить несколько серво-объектов, прикрепить разные контакты к каждому из них и обратиться к каждому индивидуально. Итак, нам нужно объявить объекты — столько сколько нам нужно:
// Создаем объекты Servo Servo1, Servo2, Servo3;
Затем нам нужно прикрепить каждый объект к сервомотору. Помните, что каждый сервопривод использует отдельный пин:
Servo1.attach(servoPin1); Servo2.attach(servoPin2); Servo3.attach(servoPin3);
В конце концов, мы должны обращаться к каждому объекту индивидуально:
Servo1.write(0); // Задать для Servo 1 позицию в 0 градусов Servo2.write(90); // Задать для Servo 2 позицию в 90 градусов
Подключение. Земля сервоприводов идёт на GND Arduino, питание на 5В или VIN (в зависимости от входа). И, в конце концов, каждый привод должен быть подключен к отдельному цифровому выводу.
Вопреки распространенному мнению, сервоприводами не нужно управлять через пины PWM — любой цифровой пин подойдет и будет работать.
Управление мышью
Чтобы управлять серво с помощью мыши, вот простой код:
/** * Servocontrol (derived from processing Mouse 1D example.) * * Updated 24 November 2007 */ // Use the included processing code serial library import processing.serial.*; int gx = 15; int gy = 35; int spos=90; float leftColor = 0.0; float rightColor = 0.0; Serial port; // The serial port void setup() { size(720, 720); colorMode(RGB, 1.0); noStroke(); rectMode(CENTER); frameRate(100); println(Serial.list()); // List COM-ports //select second com-port from the list port = new Serial(this, Serial.list()[1], 19200); } void draw() { background(0.0); update(mouseX); fill(mouseX/4); rect(150, 320, gx*2, gx*2); fill(180 - (mouseX/4)); rect(450, 320, gy*2, gy*2); } void update(int x) { //Calculate servo postion from mouseX spos= x/4; //Output the servo position ( from 0 to 180) port.write("s"+spos); // Just some graphics leftColor = -0.002 * x/2 + 0.06; rightColor = 0.002 * x/2 + 0.06; gx = x/2; gy = 100-x/2; }
Вам не обязательно использовать этот код, вы также можете отправлять команды на плату arduino с серийного монитора Arduino IDE. Позиция сервопривода от 0 до 180 — это команды 0 и 180 сек соответственно.
В основном этот код берет позицию mouseX (от 0 до 720) и делит на 4, чтобы получить угол для сервопривода (0-180). Наконец, значение выводится на последовательный порт с префиксом ‘s’.
Примечание: «s» на самом деле должен быть суффиксом, но поскольку это повторяется, это не имеет значения для результата.
Не забудьте сначала проверить с помощью println(Serial.list ()) COM-порт, который следует использовать.
Сервоприводы с непрерывным вращением
Существует специальные типы сервоприводов, обозначенные как сервоприводы непрерывного вращения. В то время как нормальный сервопривод переходит в определенную позицию в зависимости от входного сигнала, сервопривод непрерывного вращения вращается по часовой стрелке или против часовой стрелки со скоростью, пропорциональной сигналу.
Например, функция Servo1.write(0) заставит сервомотор вращаться против часовой стрелки на полной скорости. Функция Servo1.write(90) остановит двигатель, а Servo1.write(180) будет вращать вал по часовой стрелке на полной скорости.
Таким сервоприводам нашли несколько применений, но нужно понимать, что они достаточно медленные. Один из вариантов — микроволновая печь, когда есть необходимость в двигателе для вращения продуктов питания. Но будьте осторожны, микроволны — опасное дело!
В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод для Ардуино
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.

Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.

Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
Где купить популярные серво SG90, MG995, MG996
 Самый доступный вариант сервопривода SG90 1.6KG Самый доступный вариант сервопривода SG90 1.6KG |
 Сервоприводы SG90 и MG90S для Ардуино по цене ниже 70 рублей Сервоприводы SG90 и MG90S для Ардуино по цене ниже 70 рублей |
 Еще один вариант серво SG90 Pro 9g от проверенного поставщика на Али Еще один вариант серво SG90 Pro 9g от проверенного поставщика на Али |
 Servo SG90 от надежного поставщика RobotDyn Servo SG90 от надежного поставщика RobotDyn |
 Тестер для серво Тестер для серво |
 Несколько вариантов тестеров сервоприводов Несколько вариантов тестеров сервоприводов |
 Защищенные сервопривод с моментом 15 кг Защищенные сервопривод с моментом 15 кг |
 Серво JX DC5821LV 21KG Full waterproof Core mental gear 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Серво JX DC5821LV 21KG Full waterproof Core mental gear 1/8 1/10 RC car Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 |
 Серво MG996R MG996 Servo Metal Gear for Futaba JR Серво MG996R MG996 Servo Metal Gear for Futaba JR |
 Серво 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear Серво 13KG 15KG Servos Digital MG995 MG996 MG996R Servo Metal Gear |
Управление сервоприводом
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
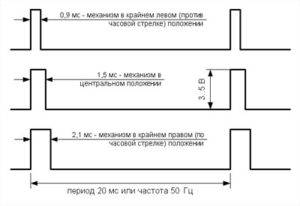
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
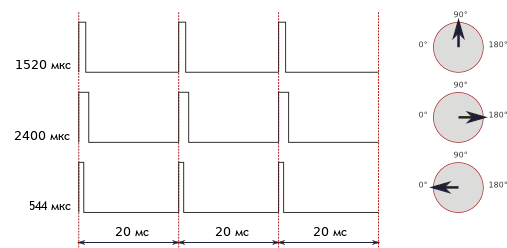
(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.
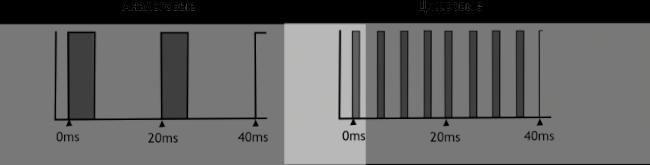
При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include Servo servo; // Создаем объект void setup() { servo.attach(9); // Указываем объекту класса Servo, что серво присоединен к пину 9 servo1.write(0); // Выставляем начальное положение } void loop() { servo.write(90); // Поворачиваем серво на 90 градусов delay(1000); servo.write(1800); delay(100); servo.write(90); delay(1000); servo.write(0); delay(1000); }
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
#include Servo servo1; // Первый сервопривод Servo servo2; // Второй сервопривод void setup() { servo1.attach(9); // Указваем объекту класса Servo, что серво присоединен к пину 9 servo2.attach(10); // А этот servo присоединен к 10 пину } void loop() { // Выставялем положения servo1.write(0); servo2.write(180); delay(20); // Меняем положения servo2.write(0); servo1.write(180); }
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo void loop() { val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон - от 0 до 180. servo.write(val); delay(15); }
Сервопривод SG90

Характеристики и подключение SG-90
Если вы собрались купить самый дешевый и простой сервопривод, то SG 90 будет лушим вариантом Этот серво чаще всего используется в управлении небольшими легкими механизмами с углом поворота от 0° до 180°.
Технические характеристики SG90:
- Скорость отработки команды 0,12с/60 градусов;
- Питание 4,8В;
- Рабочие температуры от -30С до 60 С;
- Размеры 3,2 х 1,2 х 3 см;
- Вес 9 г.
Описание SG90
Цвета проводов стандартные. Сервопривод стоит недорого, он не обеспечивает точных настроек начальных и конечных позиций. Для того, чтобы избежать лишних перегрузок и характерного треска в положении 0 и 180 градусов лучше выставлять крайние точки в 10° и 170°. При работе устройства важно следить за напряжением питания. При сильном завышении этого показателя могут повредиться механические элементы зубчатых механизмов.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения. При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов.
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include Servo myservo; void setup(){ myservo.attach(9); myservo.write(90); } void loop(){ }
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Используемые источники:
- http://wiki.amperka.ru/робототехника:сервоприводы
- https://arduinoplus.ru/arduino-servoprivod/
- https://arduinomaster.ru/motor-dvigatel-privod/servoprivody-arduino-sg90-mg995-shema-podklyuchenie-upravlenie/
 Как включить газовую колонку BOSCH?
Как включить газовую колонку BOSCH? Схема подключения генератора газель 406 инжектор. Схема электрооборудования газель
Схема подключения генератора газель 406 инжектор. Схема электрооборудования газель Как провести ремонт КПП Газели
Как провести ремонт КПП Газели Раздатка УАЗ Хантер: Устройство и переключение
Раздатка УАЗ Хантер: Устройство и переключение